Электрические средства автоматического регулирования широко используются в энергетике и других отраслях промышленности. К числу достоинств этих средств относятся: простота энергоснабжения; возможность преобразования регулируемых величин различной физической природы в электрический сигнал и передачи его на значительное расстояние; возможность формирования разнообразных алгоритмов функционирования с широким диапазоном изменения параметров настройки регуляторов; удобство централизации управления технологическими процессами; возможность построения сложных систем управления, в том числе многоуровневых с использованием ЭВМ, реализованных в АСУ ТП.
Электрические средства автоматизации в своем развитии насчитывает четыре поколения. При их эволюции произошли значительные изменения в электронной базе, конструктивном исполнении, функциональном составе, технологических характеристиках и сигналах связи.
Первое поколение электрических средств автоматизации характеризуется применением электронных ламп для усиления и преобразовании сигналов, использованием индивидуальных измерительных приборов с естественным (не унифицированным) сигналом связи. Основным типом регулирующих приборов первого поколения были РПИБ – регулирующий прибор импульсного действия с бесконтактным выходом и РПИК – тот же прибор, но с контактным выходом.
Второе поколение электрических средств автоматизации отличается применением полупроводниковых элементов и переходом к блочно-модульному принципу конструирования приборов с унификацией корпусов отдельных блоков и преимущественным использованием унифицированных сигналов связи, главным образом токового сигнала 0 – 5 мА.
В схеме регулирующих приборов этого поколения аппаратура серии РП-2 Чебоксаркского завода электрических исполнительных механизмов и комплекс блоков под общим названием «КАСКАД» Московского завода тепловой автоматики.
Третье поколение характеризуется использованием в качестве элементной базы интегральных микросхем. Это «в частности» агрегатный комплекс электрических средств регулирования «АКЭСР».
К четвертому поколению электрических средств автоматизации относится программируемые регуляторы с автоматической переменной настройкой в зависимости от свойств объекта регулирования «ПРОТАР», «РЕМИКОНТ». В их числе системы приборов автоматического регулирования «РЕМИКОНТ» и «ПРОТАР».
11.1 Электрическая унифицированная система приборов автоматического регулирования «КАСКАД».
Конструктивно структурная схема системы «КАСКАД» состоит из: измерительного и нормирующего блоков, функциональных и регулирующих блоков, исполнительных механизмов, оперативных и вспомогательных устройств. (Рис. 11.1)
Рис. 11.1 Функциональная структурная схема системы «КАСКАД»
Входные сигналы поступают от первичных измерительных преобразователей (датчиков) с унифицированными токовыми сигналами 0-5 мА.
От датчиков с не унифицированными токовыми сигналами сигналы подаются на преобразователи, которые преобразуют их в унифицированные сигналы.
Унифицированные токовые сигналы, пропорциональные значениям регулируемой величины, могут поступать на вход соответственно функциональных блоков, измерительного блока или непосредственно на регулирующие блоки Р-21 и Р-12.
По своему функциональному назначению все устройства, относящиеся к аппаратуре «КАСКАД», делят на следующие группы: статического преобразования информации; динамического преобразования информации; оперативного управления; исполнительные механизмы; вспомогательные устройства.
Устройства статического преобразования информации. Функциональные блоки.Блок суммирования А-04 – обеспечивает суммирование 4-х токовых сигналов 0-5мА, выдача результата также в виде токового сигнала 0-5мА.Блок умножения А-31 – выполняет операции умножения двух сигналов.Блок деления двух токовых сигналов , блок А-32.Блок извлечения корня А-33 – выполняет операцию извлечения квадратного корня в соответствии с зависимостью .Блок ограничения Н-02 – предназначен для применения в схемах автоматического регулирования в качестве устройства, обеспечивающего ограничение токового сигнала по минимуму и максимуму.Блок аналого-релейного преобразования Л-02 – реализует характеристику 2-х позиционного реле с зоной возврата. Используется в схемах синхронизации хода двух исполнительных механизмов и других схемах регулирования.Блок нелинейных преобразований БНП-04 – предназначен для воспроизведения статической функциональной зависимости с помощью кусочно-линейной аппроксимации из шести участков.Блок диффиринцирования Д-01 – реализует передаточную функцию. Используется обычно в каскадных системах регулирования (регулирования температуры и давления пара).Блок динамического преобразования Д-03 – обеспечивает реализацию передаточной функции одного из следующих звеньев:реального дифференцирующего звена; идеального дифференцирующего звена; апериодического, интегрирующего и пропорционального звена. Особенностью блока является возможность дистанционного дискретного изменения коэффициента передачи и постоянной времени этих звеньев.
1-2 Измерительный блок И-04 осуществляет суммирование четырех токовых сигналов 0-5 мА. Служит для формирования сигнала рассогласования между сигналом задания входным и выходным сигналоми.
Устройства динамического преобразования информации. Регулирующий блок аналоговый Р-12 – обеспечивает формирование выходного сигнала постоянного тока 0-5 мА, связанного с входными сигналами пропорциональным (П), пропорционально-интегральным (ПИ), и ПИД законом регулирования и имеет ограничитель выходного сигнала по min и по max, а также обеспечивает сглаживание (демпфирование) пульсаций входных сигналов.
Регулирующий блок релейный Р-21 служит для формирования импульсов управления электрическими ИМ постоянной скорости, в комплекте с которыми обеспечивает ПИ закон регулирования.
Устройства оперативного управления. Устройство задающее потенциометрическое ЗУ-11 предназначено для оперативного изменения задающего значения регулируемой величины с пульта управления. Устройство, задающее токовое ЗУ-05 – обеспечивает формирование задания в виде унифицированного токового сигнала 0-5мА с ручным управлением. Применяется в тех случаях, когда в системе регулирования отсутствует измерительный блок и требуется распределение сигнала задания нескольким потребителям. Блок управления аналогового регулятора БУ-12 – предназначен для переключения выходных цепей регулирующего блока Р-12 с автоматического регулирования на ручное и обратно. Блок управления релейного регулятора БУ-21 – позволяет реализовывать следующие функции:
Переключение цепей управления ИМ постоянной скорости при работе его в комплекте с релейными регулирующим блоком Р-21 с возможностью установки трех режимов: автоматического управления; ручного управления, внешнего управления с блочного щита управления (БЩУ). Блок селектирования БСЛ-04 обеспечивает выделение нпибольшего и наименьшего токового сигнала.
Исполнительные устройства и механизмы. В соответствии с двумя разновидностями регулирующих блоков Р-21 и Р-12 в системе «КАСКАД» имеется два вида усилителей мощности: для усиления аналогового сигнала 0-5мА и дискретного сигнала 0; 24В.
Аналоговый усилитель мощности У-252 используется в комплекте с блоком Р-12 и предназначен для управления объектами, требующими непрерывного измерения электрического сигнала. Релейные усилители мощности используются в комплекте с релейными регулирующими блоками и электрическими ИМ постоянной скорости.
В системе «КАСКАД» с регулирующим блоком Р-21 ИМ снабжаются пусковыми устройствами. Пусковые устройства обеспечивают необходимое усиление мощности управляющих сигналов, поступающих от регулирующего блока, при автоматическом регулировании или при ручном управлении от оператора.
При использовании электрических исполнительных механизмов постоянной скорости управляющие сигналы носят характер импульсов одинаковой амплитуды.
Пусковые устройства могут быть контактные и бесконтактные. Каждый тип пускового устройства рассчитан на работу в комплекте с определенным типом исполнительного механизма. С ИМ типа МЭОБ (механизм электрический однооборотный бесконтактный) используется теристорный усилитель мощности релейного типа У-101. С ИМ типа МЭО (механизм электрический однооборотный) – пускатель бесконтактный реверсивный ПБР-2. С ИМ типа МЭОК (механизм электрический однооборотный контактный) – пускатель магнитный реверсивный ПМРТ.
Контактные пусковые устройства - пускатель магнитный реверсивный предназначен для управления трехфазным асинхронным электродвигателем переменного тока мощностью 0,27 кВт, при напряжении 220/380 В,. либо электродвигатель мощностью 0,4-1 кВт типа МЭОК.
Бесконтактные пусковые устройства (ПБР) применяют для бесконтактного управления электроприводом, используя при этом магнитный или тиристорный усилитель.
Переход на бесконтактные пусковые устройства связан с недостаточной надежностью контактных магнитных пускателей. В тиристорном и магнитном усилителях сигнал, поступающий от регулируемого блока, усиливается до уровня, достаточного для управления исполнительным механизмом.
В состав ИМ входят: асинхронный электродвигатель (2-х или 3-х фазный), редуктор, концевые или путевые выключатели, датчики положения, тормозное устройство, ручной привод.
Электродвигатель с регулятором служит для преобразования электрической энергии в механическую, достаточную для преодоления сил сопротивления от действия среды со стороны регулировочных органов.
Концевые выключатели - используются для отключения пускового устройства при достижении регулировочным органом крайних положений, тем самым, они выполняют защитные функции.
Путевые выключатели служат для ограничения диапазона перемещения регулировочного органа в автоматическом режиме.
Датчики положения - формируют сигнал, пропорциональный углу поворота выходного устройства-вала ИМ. Этот сигнал подается на индикатор положения на пульте оператора, а так же может быть использован в системе управления в качестве сигнала обратной связи по положению регулировочного органа.
Тормозное устройство- устанавливается в ИМ для уменьшения выбега выходного вала в процессе останова электродвигателя.
Ручной привод служит в ИМ для обеспечения возможности перемещения регулировочного органа при входе из строя пускового устройства.
Параметры сигналов связи регулирующих блоков, пусковых устройств и исполнительных механизмов стандартизованы, поэтому один и тот же тип исполнительных устройств может использоваться с различными системами регулирования.
Исполнительные механизмы типа МЭО имеют наибольшее распространение среди электрических ИМ постоянной скорости в составе релейно-импульсных регуляторов. МЭО состоит из 2-х фазного асинхронного электродвигателя (типа ДАУ) многоступенчатого зубчатого редуктора, электромагнитного тормоза и датчика перемещения. Частота вращения выходного вала редуктора при работе электродвигателя постоянна, но может меняться путем изменения передаточного отношения редуктора. Угол полного перемещения выходного вала может устанавливаться в диапазоне 0-90º и 0-240º. Фрикционная муфта электрического тормоза расположена на валу электродвигателя и прижата к нему пружиной. При появлении управляющего сигнала пружина вновь прижимает муфту к валу, при этом разгон и выбег выходного вала находятся в пределах 0,5-1 градуса.
Исполнительные механизмы типа МЭОК предназначены для контактного управления электроприводом и перемещения регулировочных органов АСР. В соответствии с управляющими сигналами, поступающими от регулирующего блока. В корпусе ИМ размещается тихоходный редуктор с электроприводом и узел ручного привода –дублера, а так же датчик перемещения с унифицированным токовым выходным сигналом 0-5 мА и два концевых выключателя.
Исполнительные механизмы типа МЭОБ предназначен для бесконтактного управления сервоприводом и снабжен электромагнитным тормозом, подключенным параллельно обмоткам статора электродвигателя.
Вспомогательный устройства системы «КАСКАД». Блок указателей В-12 содержит два стрелочных индикатора один из которых используется для контроля выходного сигнала аналогового регулирующего прибора Р-12 или в качестве индикатора положения ИМ, а второй для контроля сигнала рассогласования на входе в Р-12. Блок сигнализирующих приставок В-21, используемых при работе релейного регулирующего блока Р-21 с магнитным пускателем ПМР-69.
11.2 Агрегатный комплекс электрических средств регулирования «АКЭСР».
«АКЭСР» по сравнению с другими комплексами средств автоматического регулирования имеет ряд особенностей, основные из которых следующие:
Широкое использование интегральных микросхем специального и общего назначения, благодаря чему сокращаются габариты отдельных модулей и обеспечивается высокая надежность устройств.
Повышение функциональности и насыщенности отдельных блоков. Каждый блок АКЭСР может выполнять обычно несколько функций одновременно, что приводит к сокращению общего числа блоков в схеме управления. Расширение функциональных возможностей системы управления, среди которых выполнение дистанционного изменения параметров динамической настройки параметров регулирующих блоков.
Выполнение дистанционного и автоматического переключения режима работы схемы регулирования с помощью блоков управления. Широкий выбор унифицированных электрических сигналов связи - токовых и напряжения.
Блочно модульный принцип агрегатированного построения «АКЭСР» позволяет проектировать и применять комплексные АСР практически любой сложности с различными вычислительными и логическими функциями.
Функциональная структурная схема «АКЭСР». По функциональному назначению комплекс АКЭСР содержит следующие блоки: кондуктивного разделения, функциональные, регулирующие, оперативного управления и исполнительные устройства.
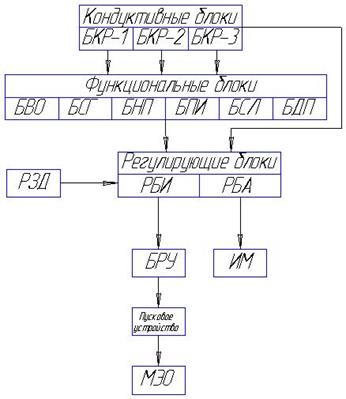
Рис. 11.2 Функциональная структурная схема «АКЭСР».
Блоки кондуктивного разделения(БКР). БКР образуют группу устройств ввода – вывода информации. В каждом из 3-х модификаций БКР производится преобразование токового сигнала (0-5; 0-20; 4-20 мА) в сигнал напряжения (0-10В), а так же демпфирование (сглаживание) сигнала или дифференцирование с помощью реального дифференциального звена с постоянной времени Т=0-24с и коэффициентом усиления К=0,5-24. Блок БКР-1 в дополнение к общим функциям выполняет алгебраическое суммирование 3-х сигналов с масштабированием 2-х из них. Блок БКР-2 отличается тем, что имеет два независимых идентичных канала, каждый из которых реализует указанные выше функции.
Блок БКР-3 в дополнение к общим функциям так же обеспечивает двухпредельную сигнализацию с независимой установкой порогов срабатывания и контактным выходом. Для ввода сигналов в систему регулирования может применятся та из модификаций БКР, которая в большей степени отвечает функциональной структуре схемы. Если специальная функция не требуется, то используют БКР-2 для сокращения количества аппаратуры. Для вывода аналоговых сигналов из схемы регулирования с выдачей токового сигнала предназначен блок БКР-1.
Функциональные блоки. Функциональные блоки предназначены для статического преобразования информации.
Блок вычислительных операций является универсальным вычислительным устройством и обеспечивает выполнение следующих операций: умножение двух сигналов; возведение в квадрат; деление двух сигналов; извлечение квадратного корня; кроме того блок содержит два сумматора входных сигналов;
БСГ – блок сигнализации служит для сигнализации о достижении установленных значений. Позволяет реализовать релейную характеристику (Рис. 11.3) двухпозиционную (а) трехпозиционную (б).
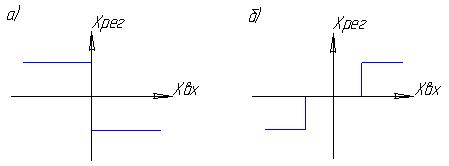
Рис. 11.3 Релейные характеристики
БНП – блок нелинейных преобразователей позволяет реализовать нелинейную зависимость выходного сигнала от входного путем кусочно-линейной аппроксимации из шести участков, обеспечивает суммирование двух сигналов с масштабированием одного из них.
БСЛ – блок селектирования – содержит 4 сумматора с умножением на постоянный коэффициент. Блок позволяет: выделять наибольший и наименьший сигнал из комбинации входных сигналов; воспроизводить простейшие нелинейные зависимости, как ограничение выходного сигнала, зона нечувствительности и др;
Все рассмотренные блоки статического преобразования информации рассчитаны на сигналы по напряжению.
Функциональные блоки динамического преобразования информации. БПИ - блок прецизионного интегрирования - служат для преобразования дискретного входного сигнала в аналоговый выходной и интегрирования аналогового сигнала с логическим управлением и сохранением информации в перерывах питания.
БДП – блок динамических преобразователей может выполнять одновременно функции сумматора и интегратора, либо дифференциатора.
Устройства динамического преобразования информации – регулирующие блоки. Регулирующий блок импульсный (РБИ) предназначен для формирования ПИ и ПИД законов регулирования в автоматах регуляторах, содержащих ИМ постоянной скорости.
Выпускаются три основные разновидности РБИ отличающиеся дистанционной подстройки параметров регулятора: постоянной времени интегрирования Та и скорости связи Vсв, скорости заряда RC-цепочки обратной связи.
РБИ – 1 не имеет дистанционной подстройки параметров.
РБИ – 2 обеспечивает дистанционную подстройку параметров Vсв и Та.
РБИ – 3 обеспечивает аналоговую дистанционную подстройку параметров.
Регулирующий блок аналоговый РБА – обеспечивает формирование сигнала рассогласования и его динамическое преобразование в выходной аналоговый (плавно меняющийся) сигнал в соответствии с П-, ПД-, ПИД- или ПИД- законом регулирования с ограничением выходного сигнала по верхнему либо нижнему уровню. Блок обеспечивает переключение с режима ручного управления на автоматический и обратно. Блок РБА имеет 5 входов для аналоговых сигналов по напряжению и два входа для сигналов по току и выходы как по напряжению, так и по току.
Блоки оперативного управления и исполнительные устройства. Ручные задатчики РЗД и РЗД-К которые обеспечивают ручную установку задания в виде унифицированного аналогового сигнала по току или по напряжению.
Задатчик РЗД-к кнопочный содержит дистанционный переключатель на два положения с импульсным управлением, а так же кнопку для ручной установки переключателя в одно из положений. Блок ручного управления БРУ служит для перевода управления ИМ с ручного на автоматическое и обратно, а так же для работы ИМ в режиме ручного управления. Блок имеет три кнопки: Кн. А – включение автоматического режима. Кн. «Меньше» - ручное управление в сторону «меньше». Кн. «Больше» - ручное управление в сторону «больше».
БРУ имеет модификации по исполнению и функциям, так, например, БРУ-У имеет встроенный указатель для индикации выходного сигнала регулирующего блока РБА, интеграторов БПИ и БДП, а так же для индикации положения ИМ при наличии соответствующего датчика положения с унифицированным сигналом.
В системе «АКЭСР» используются те же исполнительные устройства, что и в аппаратуре «КАСКАД», благодаря унификации выходных сигналов регулирующих блоков.
Автоматика (лекции)
ЛЕКЦИЯ 1.
Основные понятия и определения
В современном мире мы повсюду встречаемся с устройствами и системами, выполняющими различные простые и сложные операции без непосредственного участия человека. Такие устройства и системы называются – автоматическими системами . Для их правильного функционирования, обслуживания, управления, а также для разработки и проектирования таких систем требуются специальные знания. Все это изучает научная дисциплина, которая называется – автоматика .
Автоматика – это область теоретических и прикладных знаний об автоматически действующих технических устройствах и системах. Таким образом, ясно, что автоматика включает в себя как теорию автоматического регулирования и управления, так и совокупность технических средств, необходимых для построения автоматических систем.
В зависимости от функций, выполняемых автоматическими устройствами можно выделить три основных вида систем автоматики:
системы автоматического контроля;
системы автоматической защиты;
системы автоматического управления (САУ).
Автоматический контроль предназначен для :
сигнализации;
автоматического измерения и индицирования;
сбора информации.
Автоматическая сигнализация предназначена для оповещения о нормальных, предельных и аварийных значениях контролируемых параметров, а также для указания места и характера нарушений производственного процесса.
Автоматическое измерение служит для измерения и передачи на указательные и регистрирующие приборы различных параметров производственного процесса.
Автоматический сбор информации предназначен для получения общей информации о ходе производственного процесса, качестве выпускаемой продукции и т.п. Он предполагает возможность передачи, хранения и последующей обработки средствами вычислительной техники совокупности различных параметров производственного процесса.
Автоматическая защита служит для предотвращения ненормальных или аварийных режимов работы. В случае возникновения таких аварийных режимов система автоматической защиты может либо прекратить контролируемый процесс, либо вывести его из аварийного режима.
Автоматическое управление предназначено для целенаправленного изменения различных параметров производственного или технологического процесса. Разновидностью автоматического управления является автоматическое регулирование . Под этим понимается процесс поддержания или целенаправленного изменения какого-либо одного параметра. Автоматическое устройство, которое выполняет такую функцию, называется регулятором .
Структура систем автоматического управления
Автоматическая система управления любой сложности состоит из:
объекта управления;
автоматического управляющего устройства.
В общем виде САУ можно изобразить следующим образом.
Состояние объекта характеризуется выходной величиной Х . В общем случае выходных величин несколько, и тогда состояние объекта характеризуется вектором Х .
От УУ на вход объекта поступает управляющее воздействие U .
Помимо управляющего воздействия к объекту приложено также возмущающее воздействие (возмущение, помеха) F , которое изменяет состояние объекта, т.е. Х , препятствуя управлению.
На вход управляющего устройства подается задающее воздействие (задание) G , содержащее информацию о требуемом значении Х , т.е. о цели управления. Переменные U , G , F в общем случае являются векторами.
В технике под объектом управления подразумевается техническое устройство или технологический процесс, некоторые физические параметры которого подлежат стабилизации или целенаправленным изменениям. Объект управления взаимодействует с внешней средой. Воздействие окружающей среды на объект управления называется возмущающим воздействием. Для того чтобы объект управления мог реагировать на внешние воздействия, он должен иметь орган управления, или регулирующий орган . Например, если объектом регулирования является электрическая печь сопротивления, то регулирующим органом у нее может быть реостат, автотрансформатор, либо тиристорный блок.
Автоматическим управляющим устройством называется устройство, осуществляющее воздействие на объект управления в соответствии с заложенным в нем законом (алгоритмом) управления. Обычно управляющее устройство действует на объект управления через орган управления.
Связь между различными элементами автоматической системы управления (например, связь между регулятором и регулирующим органом объекта управления; или связь между объектом управления и его регулирующим органом) осуществляется с помощью сигналов. Дадим определение сигнала .
Сигналами называются физические процессы, параметры которых содержат информацию. Например, в телефонной связи звук передается при помощи электрических сигналов. Параметры, содержащую информацию, называются информационными параметрами. Например, сигнал – электрический ток, информационный параметр – амплитуда тока или напряжения.
Те физические величины объекта управления, которые требуется стабилизировать, либо изменять по заданному закону называются регулируемыми параметрами . В термическом процессе (электрическая печь) таким регулируемым параметром является температура.
Рассмотрим, что из себя представляет УУ , которое перерабатывает получаемую информацию по определенному заложенному в нем алгоритму (правилу), в результате чего на его выходе возникает управляющее воздействие.
Основными частями УУ являются: чувствительное устройство ЧУ , вычислительное устройство ВУ и исполнительное устройство ИУ .
ЧУ служат для измерения переменных Х ,G и F .
ВУ реализует алгоритм работы управляющего устройства, соответствующим образом перерабатывая поступающую от чувствительных устройств входную информацию. В простейшем случае оно осуществляет простые математические операции, такие как операция сравнения, определяющая разность Х – G , операции интегрирования, дифференцирования, статического нелинейного преобразования и т.п. В более сложных случаях ВУ может представлять собой вычислительную машину и даже комплекс таких машин.
ИУ предназначены для непосредственного управления объектом, т.е. изменения его состояния в соответствии с сигналом, выдаваемым вычислительным устройством, чтобы свести к нулю рассогласование.
Помимо перечисленных частей, в состав УУ могут входить различные специальные устройства, например, преобразователи, служащие для согласования отдельных частей системы, устройств связи и т.п.
2. Классификация систем автоматического управления.
Все системы управления и регулирования делятся по различным признакам на следующие основные классы.
По принципу действия :
Разомкнутые системы;
Замкнутые системы;
Комбинированные системы;
Адаптивные системы.
По виду задающего воздействия g (t ) :
Системы стабилизации, если g (t ) = const;
Системы программного управления, если g (t ) – наперед заданная функция времени;
Следящие системы, если g (t ) – случайная величина.
По математическому описанию :
Линейные системы;
Нелинейные системы.
В схеме САУ, изображенной на рис.1, на УУ поступают три вида информации: информация о величине Х , определяющей состояние объекта, информация о величине G , задающей цель управления, информация о F – возмущениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ – разомкнутые системы и замкнутые системы.
В разомкнутых САУ выходная величина объекта Х не измеряется, т.е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что вследствие этого в них отсутствует обратная связь между выходом объекта и входом УУ, при наличии которой объект и УУ образуют замкнутый контур.
Обратная связь – это такая связь, при которой информация о состоянии управляемого объекта передается с выхода системы на вход УУ.
Возможны разомкнутые САУ, в которых УУ измеряет только одно задающее воздействие G , одно возмущение F и, наконец, оба эти сигнала одновременно.
В первом варианте разомкнутой САУ управление осуществляется по задающему воздействию : поступающие извне команды G приводят путем изменения управляющего воздействия U к соответствующему изменению выходной величины объекта Х . Точность обеспечиваемого при этом соответствия между Х и G целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работы системы и невысоких требованиях к точности.
Примером системы этого типа служит разомкнутая система программного управления напряжением синхронного генератора, изображенная на рис.3.
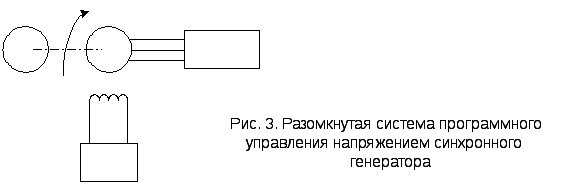
Объектом управления здесь является синхронный генератор Г, вращаемый с постоянной скоростью двигателем Д. Выходная величина объекта – напряжение генератора – определяется напряжением возбуждения, подаваемым на обмотку возбуждения генератора ОВ от устройства задания графика напряжения УЗГ. Последнее является управляющим устройством. Напряжение возбуждения автоматически изменяется во времени в соответствии с заложенной в УЗГ программой, обеспечивая соответствующее изменение напряжения генератора.
Вторым вариантом разомкнутой САУ является система автоматического управления по возмущению , или, как ее еще называют, система автоматической компенсации . Такие системы находят применение, в частности, когда задача управления сводится к поддержанию постоянства выходной величины Х объекта.
На рис.4 в качестве примера такого типа системы показана система стабилизации напряжения синхронного генератора при переменной электрической нагрузке на его зажимах.
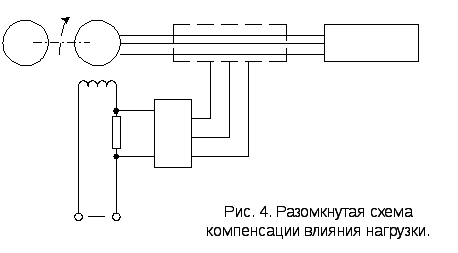
Чувствительное устройство, состоящее из трех трансформаторов тока ТТ и выпрямителя В, выдает напряжение постоянного тока, пропорциональное току генератора. Это напряжение подается в цепь возбуждения генератора, изменяя ток возбуждения. При увеличении, например, нагрузки напряжение на зажимах генератора соответственно уменьшится за счет увеличившегося падения напряжения на обмотке статора. Однако одновременно благодаря действию сигнала по току нагрузки генератора, создаваемого чувствительным элементом, ток возбуждения генератора увеличится настолько, что в результате напряжение генератора возвратится к своему исходному значению. Таким образом происходит компенсация влияния изменения нагрузки на напряжение генератора и обеспечивается поддержание напряжения на постоянном уровне в условиях переменной нагрузки.
Система управления по задающему и возмущающему воздействиям является наиболее полным видом разомкнутой САУ. В этом случае управление объектом осуществляется в функции двух величин G иF , т.е. здесь объединены оба предыдущих варианта разомкнутых систем.
Примером такой системы может быть система программного управления напряжением генератора, объединяющая схемы, изображенные на рис.3 и 4. (В этом случае в схеме рис.4 напряжение питания цепи возбуждения должно подаваться от устройства задания графика напряжения УЗГ, показанного на рис.3.). В отличие от системы программного управления, изображенной на рис.3, в данной схеме устраняется основная ошибка по напряжению, вызванная непостоянством нагрузки генератора.
Принцип компенсации возмущения позволяет существенно повысить точность управления в разомкнутых САУ. Однако, все же эта точность остается невысокой, во-первых, вследствие невозможности охватить компенсацией все возмущения, действующие на систему (в том числе и на УУ), и, во-вторых, из-за изменения во времени параметров объекта и управляющего устройства. В силу изложенного разомкнутые САУ нашли применение только при невысоких требованиях к точности управления.
В замкнутых САУ на вход УУ подаются задающее воздействие G и выходная величина объекта Х . Исходя из величины G , УУ определяет соответствующее требуемое значение Х и, имея информацию о текущем значении Х , обеспечивает необходимое соответствие между Х и G путем воздействия на объект.
В такой САУ УУ стремится ликвидировать все отклонения Х от его значения, определяемого заданием G , независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
САУ такого типа представляют собой замкнутый контур , образованный объектом и УУ. При этом УУ создает обратную связь вокруг объекта, связывая его выход со входом. Замкнутые САУ называются поэтому еще системами с обратной связью или системами управления по отклонению.
Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
На рис.5 показана в качестве примера замкнутая система управления напряжением синхронного генератора.
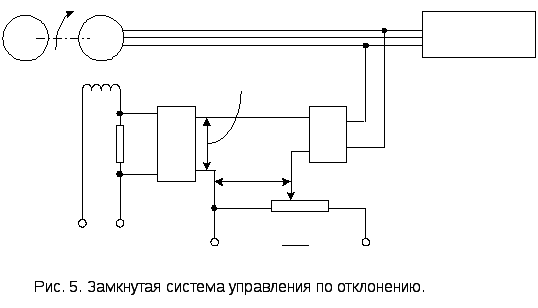
УУ состоит из измерителя напряжения ИН, который включает в себя тр-р напряжения ТН с выпрямителем и является чувствительным устройством; устройства задания величины напряжения U З в виде делителя напряжения R З, питаемого стабилизированным напряжением, и усилителя У, являющегося одновременно и исполнительным устройством, воздействующим на объект. ВУ в схеме на рис.5 представляет собой простейшую схему сравнения напряжений U и U З на входе усилителя, определяющую разность U = U З – U.
Напряжение U постоянного тока на выходе измерителя напряжения ИН однозначно связано с напряжением генератора U Г. Когда U = U З, сигнал U на входе усилителя У равен нулю и УУ не действует на генератор, являющийся объектом управления. Если по какой-либо причине, например, вследствие изменения нагрузки генератора или скорости его вращения, напряжение генератора изменится, на входе усилителя появится напряжение U соответствующей величины и знака. В результате на выходе усилителя возникает напряжение, которое изменит ток возбуждения генератора, что приведет к возврату напряжения генератора к исходному значению.
Если в схеме на рис.5 вместо делителя напряжения R З поставить УЗГ, получится замкнутая система программного управления напряжением генератора.
Комбинированные САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию. Показанная на рис.1 схема является схемой такой комбинированной САУ.
Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта какого-либо возмущения облегчает задачу замкнутой САУ и тем самым позволяет упростить ее и повысить точность управления. Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации.
Примером комбинированной системы может служить система автоматического управления напряжением синхронного генератора, представляющая собой объединение схем рис.4 и 5.
Среди различных автоматических систем наибольшее распространение получили системы автоматического регулирования, в которых реализован принцип регулирования по отклонению. Поэтому ограничимся рассмотрением типовых элементов этих схем.
Для пояснения идеи устройства и принципа действия автоматических систем применяют функциональные схемы.
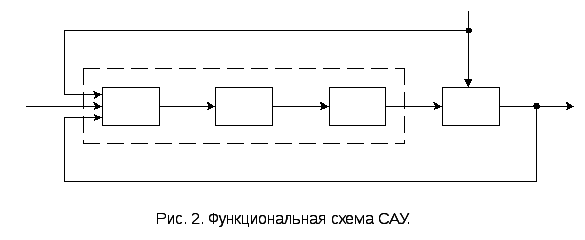
Функциональная схема составляется из функциональных блоков, которые представляют собой элементы автоматических систем, выполняющих определенные функции. Функциональные блоки изображают в виде прямоугольников, внутри которых надписывают их наименование в соответствии с выполняемыми функциями (рис. 2). Связи между функциональными блоками обозначаются линиями со стрелками, которые указывают направление воздействий. Представим наиболее общий случай построения САУ (Рис. 6).
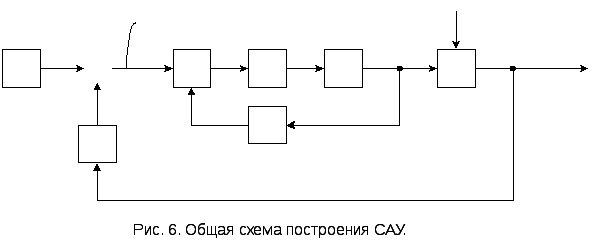
Здесь ЗУ – задающее устройство; ПЭ – преобразовательный элемент (для согласования различных частей системы); У – усилитель; ИУ – исполнительное устройство; О – объект управления; КУ – корректирующее устройство для улучшения динамических свойств (местная обратная связь); ЧУ – измерительное устройство (чувствительный элемент (устройство)).
Обязательным элементом системы управления, как нам известно, является объект управления (ОУ). Цель управления состоит в поддержании некоторого параметра этого объекта управления на заданном уровне. Следовательно, для работы системы необходимо еще два элемента: 1) устройство, позволяющее системе воспринимать и отслеживать изменения регулируемого параметра x (t ), т.е. датчик (ЧУ); 2) устройство, сообщающее системе о том, какое значение должен иметь регулируемый параметр в текущий момент времени g (t ), т.е. задающее устройство (ЗУ). Далее, для работы системы требуется устройство, позволяющее сравнивать заданное значение регулируемого параметра с его реальным значением, т.е. сравнивающее устройство (СУ). Если реальное и заданное значение регулируемого параметра не совпадают, то нужно каким-то образом воздействовать на объект управления, так чтобы в итоге добиться совпадения сигналов x (t ) и g (t ). Воздействие на объект управления, как мы знаем, осуществляется через регулирующий орган (ИУ), а принятие решения относительно степени воздействия ложится на автоматическое управляющее устройство, называемое регулятором.
Объединив все перечисленное, мы получили типичную систему автоматического управления, которая позволяет поддерживать параметр x (t ) на заданном уровне g (t ). Насколько эффективно будет работать такая система, зависит от конкретных характеристик всех ее элементов. Характеристики объекта управления, регулирующего органа и датчика, используемых в нашей системе управления, жестко заданны их конструкцией и практически не меняются – это неизменяемая часть системы. Характеристики регулятора, как правило, можно варьировать с помощью изменения его настроечных параметров, так чтобы добиться максимально возможного качества регулирования. Это принципиально изменяемая часть системы. При анализе работы системы, как правило, нет необходимости детально отражать устройство отдельных ее частей, поэтому все элементы неизменяемой части можно объединить в виде одного элемента и рассматривать его как единый объект управления.
Цель управления, формируемая задающим устройством в виде сигнала g (t ), является по отношению к системе управления внешней информацией, поэтому на функциональных схемах задающее устройство можно не указывать, а сигнал g (t ) рассматривать как входной сигнал. С учетом сказанного, функциональная схема системы управления примет более простойвид.
"УСТРОЙСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН"
По дисциплине:
"Автоматика в электрических системах"
Содержание 1. Общие сведения об устройствах автоматического регулирования возбуждения синхронных машин 3- 2. Устройство токового компаундирования 5
- 3. Электромагнитный корректор напряжения 7
- Список использованной литературы 10
Кривенков В. В, Новелла В.Н. Релейная защита и автоматика систем электроснабжения: учебн. пособие для вузов. - М.: Энергоиздат, 1981.328 с., ил.
Чернобровов Н.В. Релейная защита. Учебное пособие для техникумов. Изд.5-е, перераб. И доп.М., "Энергия", 1974.
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, - регулируемой величиной . Например, если уровень жидкости в закалочном баке снижается, то необходимо увеличивать подачу воды в бак до тех пор, пока уровень не достигнет заданного значения. В данном примере уровень жидкости является регулируемой величиной, а закалочный бак, в котором регулируется уровень, -объектом регулирования. Следовательно, операция поддержания равенства регулируемой величины ее заданному значению является регулированием. Регулирование может осуществляться вручную и автоматически.
Рассмотрим принцип работы лабораторной нагревательной печи, подключенной к электросети через автотрансформатор. Пусть для измерения температуры в печи установлен термоэлектрический преобразователь (термопара), подключенный к милливольтметру. Лаборант, наблюдая за показаниями милливольтметра, регулирует напряжение на нагревательных элементах печи. Если температура в печи оказывается ниже заданной, он увеличивает напряжение на нагревательных элементах, отчего температура повышается; и наоборот, если температура повышается, то лаборант уменьшает напряжение на нагревательных, элементах. Таким образом, лаборант, изменяя напряжение на нагревательных элементах, регулирует температуру. Такое регулирование называют ручным регулированием. I Для автоматизации процесса регулирования необходимо, чтобы какое-либо устройство непрерывно или периодически измеряло значение регулируемой величины, сравнивало с заданным значением и в случае несоответствия с помощью регулирующего органа корректировало технологический процесс, поддерживая заданное значение регулируемой величины. Такое регулирование, в котором управление осуществляется различными устройствами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измерите-льного элемента (первичного преобразователя), исполнительго механизма и регулирующего органа, называют автоматическим регулятором .
Система автоматического регулирования (рис. 1) представит собой совокупность отдельных элементов, направленно действующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением XQ .
Рис. 1, Схема системы автоматического регулирования
В цепи главной обратной связи имеется инвертор, изменяющий знак сигнала X. В случае неравенства величин, поступающих на сравнивающее устройство, т. е. в случае рассогласования, на выходе задающего устройства появляется сигнал АХ = = Хо - X, пропорциональный рассогласованию . Этот сигнал подается на вход регулятора. В регуляторе сигнал АХ преобразуется и усиливается по мощности до уровня, необходимого дли управления исполнительным устройством. Исполнительное устройство в свою очередь воздействует на объект регулирования. При этом регулируемая величина X в результате регулирующего воздействия Y изменяется в сторону уменьшения отклонения АХ.
Рассмотрим несколько подробнее основные элементы системы автоматического регулирования.
Для установления текущего значения регулируемой величины X в системе имеются специальные элементы получения информации, которые называются измерительными элементами . Основная функция измерительного элемента - измерение регулируемой величины (температуры, давления, запыленности и т. п.) и ее преобразование в электрический, пневматический или гидравлический сигналы, удобные для подачи последующим элементам системы. Измерительными элементами, как правило, являются первичные преобразователи аналогового или дискретного действия.
Сигналы задающих органов (органов настройки), как и выходные величины измерительных элементов, могут иметь различную физическую природу. В связи с этим задающие органы могут быть электрическими, механическими, пневматическими и т. п. В электрических регуляторах, где выходным является электрический сигнал, задающие органы выполняются в виде резисторов, реостатов или потенциометров» В механических, гидравлических и пневматических регуляторах задающие органы выполняются в виде винтов, пружин или неподвижных опор.
Элементы сравнения могут иметь различные схемы, определяемые природой сравниваемых сигналов. Например, при сравнении электрических сигналов используются такие элементы, как резисторы, конденсаторы и другие элементы, а при сравнении меха-
нических величин - рычажные устройства. Заметим, что сигнал рассогласования характеризуется не только величиной, но и знаком.
В большинстве регуляторов сигнал рассогласования обладает небольшой мощностью, и поэтому его усиливают до значения, позволяющего управлять или приводить в действие исполнительный механизм.
Усиление сигнала, осуществляемое в усилительных элементах, Достигается изменением потока вспомогательной энергии, поступающей от усилителя к исполнительному механизму в соответствии со знаком и значением рассогласования.
Элементы автоматических устройств, использующие информацию о сигнале рассогласования (исполнительные элементы), предназначены для оказания регулирующего воздействия на объект регулирования с целью уменьшить рассогласования между текущими и заданными значениями регулируемой величины. В одних случаях это приводит к изменению потока энергии или топлива к регулируемому объекту (печи), в других -к измене-нию потока жидкости (закалочные баки), пара, воздуха, газа т. п. Исполнительные элементы состоят из исполнительных механизмов и регулирующих органов.
Для улучшения характера переходных процессов системы втоматического регулирования и повышения качества регулирования в систему регулирования могут вводиться стабилизирующие элементы (дополнительная обратная связь). Введение этих Элементов обусловлено тем, что регулируемая величина обычно не сразу достигает заданного значения, и, если не принимать специальных мер, регулирование затягивается, сопровождаясь колебаниями регулируемой величины относительно заданного значения. В отличие от главной обратной связи, которая связывает регулируемую величину с задающим устройством, дополнительные обратные связи передают воздействия с выхода какого-либо звена системы автоматического регулирования на вход любого предыдущего звена. Сигнал дополнительной обратной связи, подаваемый на вход, может либо складываться с входным сигналом (положительная дополнительная обратная связь), либо вычитаться из входного сигнала (отрицательная дополнительная обратная связь). В системах автоматического регулирования чаще всего используют отрицательную дополнительную связь.
В зависимости от характера эоздействия дополнительная обратная связь подразделяется на жесткую и гибкую. Жесткая дополнительная обратная связь характеризуется передачей по ней на вход части полной выходной величины на протяжении всего времени регулирования.
Гибкая (упругая) дополнительная обратная связь (изодром) характеризуется передачей по ней на вход первой или второй производной от измерения выходной величины по времени. У гибкой дополнительной обратной связи сигнал на выходе суще-
ствует только тогда, когда сигнал изменяется во времени. Таки образом, гибкая дополнительная обратная связь позволяет ос ществлять регулирование входной величины по скорости и уск< рению и тем самым значительно ускоряет процесс регулирован! и улучшает его качество. Гибкая обратная связь начинает дей ствовать только при изменении выходной величины, и ее действие прекращается после возвращения системы к установившемуt состоянию. В связи с этим иногда ее называют исчезающей обратной связью.
Системы автоматического регулирования могут основываться на трех принципах: регулирования по отклонению, регулировния по возмущению и комбинированном принципе регулирования, когда совмещаются принципы регулирования по отклонению и возмущению.
Принцип регулирования по отклонению заключается в том, что процесс регулирования осуществляется по значению регулируемой величины, которое сравнивается с заданным ее значением. При наличии сигнала рассогласования регулятор воздействует на объект, чтобы привести к равновесию регулируемую и заданные величины
Принцип регулирования по возмущению состоит в том, что из нескольких возмущений, воздействующих на объект, выбирается одно и определяется его влияние на регулируемую величину. Возмущение воздействует с помощью управляющего устройства на регулирующий орган объекта управления. В системах регулирования по возмущению вместо измерения рассогласования в измерительном элементе регулятора измеряется возмущение. Недостатком подобной системы является то, что она компенсирует влияние только одного основного возмущения и не может предотвратить влияние на регулируемую величину других возмущающих воздействий, чаще всего неконтролируемых.
Комбинированные системы сочетают в себе оба рассмотренных принципа.
Системы автоматического регулирования классифицируются по разным признакам.
По виду применяемой энергии -- электрические, пневматические, гидравлические и механические.
По виду структуры - обыкновенные и самонастраивающиеся.
По виду функциональной связи между входными и выходными величинами элементов, входящих в системы автоматического регулирования, последние делят на системы непрерывного и прерывистого действия. В системах непрерывного действия непрерывному изменению входных величин всех элементов соответствует непрерывное изменение выходных величин этих элементов.
Системы автоматического регулирования относятся к системам прерывистого (дискретного) действия, если непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует прерывистое изменение выходной величины этого элемента.
реферат по дисциплине Производство и технологии на тему: Устройства автоматического регулирования возбуждения синхронных машин; понятие и виды, классификация и структура, 2015-2016, 2017 год.
"УСТРОЙСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН"
По дисциплине:
"Автоматика в электрических системах"
Содержание 1. Общие сведения об устройствах автоматического регулирования возбуждения синхронных машин 3- 2. Устройство токового компаундирования 5
- 3. Электромагнитный корректор напряжения 7
- Список использованной литературы 10
Кривенков В. В, Новелла В.Н. Релейная защита и автоматика систем электроснабжения: учебн. пособие для вузов. - М.: Энергоиздат, 1981.328 с., ил.
Чернобровов Н.В. Релейная защита. Учебное пособие для техникумов. Изд.5-е, перераб. И доп.М., "Энергия", 1974.